De Wikipedia, la enciclopedia libre
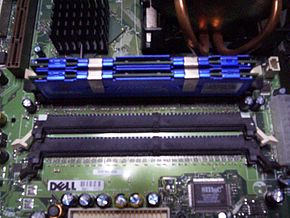
Módulos de memoria instalados de 256 MB cada uno en un sistema con doble canal. 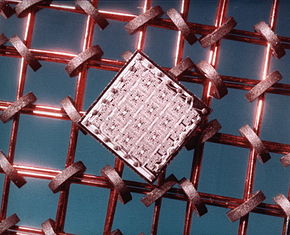
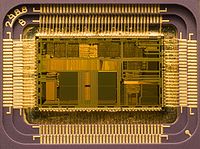
Integrado de silicio de 64 bits sobre un sector de memoria de núcleo (finales de los 60). La memoria de acceso aleatorio (en inglés: random-access memory cuyo acrónimo es RAM) es la memoria desde donde el procesador recibe las instrucciones y guarda los resultados.
// La frase memoria RAM se utiliza frecuentemente para referirse a los módulos de memoria que se usan en los computadores personales y servidores. En el sentido estricto, los modulos de memoria contienen un tipo, entre varios de memoria de acceso aleatorio, ya que las ROM, memorias Flash, caché (SRAM), los registros en procesadores y otras unidades de procesamiento también poseen la cualidad de presentar retardos de acceso iguales para cualquier posición. Los módulos de RAM son la presentación comercial de este tipo de memoria, que se compone de circuitos integrados soldados sobre un circuito impreso, en otros dispositivos como las consolas de videojuegos, esa misma memoria va soldada sobre la placa principal.
- FPM-RAM (Fast Page Mode RAM)
Inspirado en técnicas como el "Burst Mode" usado en procesadores como el Intel 486,[4] se implantó un modo direccionamiento en el que el controlador de memoria envía una sola dirección y recibe a cambio esa y varias consecutivas sin necesidad de generar todas las direcciones. Esto supone un ahorro de tiempos ya que ciertas operaciones son repetitivas cuando se desea acceder a muchas posiciones consecutivas. Funciona como si deseáramos visitar todas las casas en una calle: después de la primera vez no seria necesario decir el número de la calle únicamente seguir la misma. Se fabricaban con tiempos de acceso de 70 ó 60 ns y fueron muy populares en sistemas basados en el 486 y los primeros Pentium.
- EDO-RAM (Extended Data Output RAM)
Lanzada en 1995 y con tiempos de accesos de 40 o 30 ns suponía una mejora sobre su antecesora la FPM. La EDO, también es capaz de enviar direcciones contiguas pero direcciona la columna que va utilizar mientras que se lee la información de la columna anterior, dando como resultado una eliminación de estados de espera, manteniendo activo el buffer de salida hasta que comienza el próximo ciclo de lectura.
- BEDO-RAM (Burst Extended Data Output RAM)
Fue la evolución de la EDO RAM y competidora de la SDRAM, fue presentada en 1997. Era un tipo de memoria que usaba generadores internos de direcciones y accedía a mas de una posición de memoria en cada ciclo de reloj, de manera que lograba un desempeño un 50% mejor que la EDO. Nunca salió al mercado, dado que Intel y otros fabricantes se decidieron por esquemas de memoria sincrónicos que si bien tenían mucho del direccionamiento MOSTEK, agregan funcionalidades distintas como señales de reloj.
Arquitectura base
En origen, la memoria RAM se componía de hilos de cobre que atravesaban toroides de ferrita, la corriente polariza la ferrita. Mientras esta queda polarizada, el sistema puede invocar al procesador accesos a partes del proceso que antes (en un estado de reposo) no es posible acceder. En sus orígenes, la invocación a la RAM, producía la activación de contactores, ejecutando instrucciones del tipo AND, OR y NOT. La programación de estos elementos, consistía en la predisposición de los contactores para que, en una línea de tiempo, adquiriesen las posiciones adecuadas para crear un flujo con un resultado concreto. La ejecución de un programa, provocaba un ruido estruendoso en la sala en la cual se ejecutaba dicho programa, por ello el área central de proceso estaba separada del área de control por mamparas insonorizadas.
Con las nuevas tecnologías, las posiciones de la ferrita se ha ido sustituyendo por, válvulas de vacío, transistores y en las últimas generaciones, por un material sólido dieléctrico. Dicho estado estado sólido dieléctrico tipo DRAM permite que se pueda tanto leer como escribir información.
Uso por el sistema
Se utiliza como memoria de trabajo para el sistema operativo, los programas y la mayoría del software. Es allí donde se cargan todas las instrucciones que ejecutan el procesador y otras unidades de cómputo. Se denominan "de acceso aleatorio" porque se puede leer o escribir en una posición de memoria con un tiempo de espera igual para cualquier posición, no siendo necesario seguir un orden para acceder a la información de la manera más rápida posible.
Módulos de memoria RAM
Los módulos de memoria RAM son tarjetas de circuito impreso que tienen soldados integrados de memoria DRAM por una o ambas caras. La implementación DRAM se basa en una topología de Circuito eléctrico que permite alcanzar densidades altas de memoria por cantidad de transistores, logrando integrados de decenas o cientos de Megabits. Además de DRAM, los módulos poseen un integrado que permiten la identificación del mismos ante el computador por medio del protocolo de comunicación SPD.
La conexión con los demás componentes se realiza por medio de un área de pines en uno de los filos del circuito impreso, que permiten que el modulo al ser instalado en un zócalo apropiado de la placa base, tenga buen contacto eléctrico con los controladores de memoria y las fuentes de alimentación. Los primeros módulos comerciales de memoria eran SIPP de formato propietario, es decir no había un estándar entre distintas marcas. Otros módulos propietarios bastante conocidos fueron los RIMM, ideados por la empresa RAMBUS.
La necesidad de hacer intercambiable los módulos y de utilizar integrados de distintos fabricantes condujo al establecimiento de estándares de la industria como los JEDEC.
- Módulos SIMM: Formato usado en computadores antiguos. Tenían un bus de datos de 16 o 32 bits
- Módulos DIMM: Usado en computadores de escritorio. Se caracterizan por tener un bus de datos de 64 bits.
- Módulos SO-DIMM: Usado en computadores portátiles. Formato miniaturizado de DIMM.
Relación con el resto del sistema

Diagrama de la arquitectura de un ordenador. Dentro de la jerarquía de memoria la RAM se encuentra en un nivel después de los registros del procesador y de las cachés. Es una memoria relativamente rápida y de una capacidad media: sobre el año 2010), era fácil encontrar memorias con velocidades de más de 1 Ghz, y capacidades de hasta 8 GB por módulo, llegando a verse memorias pasando la barrera de los 3 Ghz por esa misma fecha mediante overclock. La memoria RAM contenida en los módulos, se conecta a un controlador de memoria que se encarga de gestionar las señales entrantes y salientes de los integrados DRAM. Algunas señales son las mismas que se utilizan para utilizar cualquier memoria: Direcciones de las posiciones, datos almacenados y señales de control.
El controlador de memoria debe ser diseñado basándose en una tecnología de memoria, por lo general soporta solo una, pero existen excepciones de sistemas cuyos controladores soportan dos tecnologías (por ejemplo SDR y DDR o DDR1 y DDR2), esto sucede en las épocas transitorias de una nueva tecnología de RAM. Los controladores de memoria en sistemas como PC y servidores se encuentran embebidos en el llamado "North Bridge" o "Puente Norte" de la placa base; o en su defecto, dentro del mismo procesador (en el caso de los procesadores desde AMD Athlon 64 e Intel Core i7) y son los encargados de manejar la mayoría de información que entra y sale del procesador.
Las señales básicas en el módulo están divididas en dos buses y un conjunto misceláneo de líneas de control y alimentación. Entre todas forman el bus de memoria:
- Bus de datos: Son las líneas que llevan información entre los integrados y el controlador. Por lo general están agrupados en octetos siendo de 8,16,32 y 64 bits, cantidad que debe igualar el ancho del bus de datos del procesador. En el pasado, algunos formatos de modulo, no tenían un ancho de bus igual al del procesador.En ese caso había que montar módulos en pares o en situaciones extremas, de a 4 módulos, para completar lo que se denominaba banco de memoria, de otro modo el sistema no funciona. Esa es la principal razón de haber aumentar el número de pines en los módulos, igualando el ancho de bus de procesadores como el Pentium de 64 bits a principios de los 90.
- Bus de direcciones: Es un bus en el cual se colocan las direcciones de memoria a las que se requiere acceder. No es igual al bus de direcciones del resto del sistema, ya que está multiplexado de manera que la dirección se envía en dos etapas.Para ello el controlador realiza temporizaciones y usa las líneas de control. En cada estándar de módulo se establece un tamaño máximo en bits de este bus, estableciendo un límite teórico de la capacidad máxima por módulo.
- Señales misceláneas: Entre las que están las de la alimentación (Vdd, Vss) que se encargan de entregar potencia a los integrados. Están las líneas de comunicación para el integrado de presencia que da información clave acerca del módulo. También están las líneas de control entre las que se encuentran las llamadas RAS (row address strobe) y CAS (column address strobe) que controlan el bus de direcciones y las señales de reloj en las memorias sincrónicas SDRAM.
Entre las características sobresalientes del controlador de memoria, está la capacidad de manejar la tecnología de canal doble (Dual Channel), tres canales, o incluso cuatro para los procesadores venideros; donde el controlador maneja bancos de memoria de 128 bits. Aunque el ancho del bus de datos del procesador sigue siendo de 64 bits, el controlador de memoria puede entregar los datos de manera intercalada, optando por uno u otro canal, reduciendo las latencias vistas por el procesador. La mejora en el desempeño es variable y depende de la configuración y uso del equipo. Esta característica ha promovido la modificación de los controladores de memoria, resultando en la aparición de nuevos chipsets (la serie 865 y 875 de Intel) o de nuevos zócalos de procesador en los AMD (el 939 con canal doble , reemplazo el 754 de canal sencillo). Los equipos de gama media y alta por lo general se fabrican basados en chipsets o zócalos que soportan doble canal o superior.
Tecnologías de memoria
La tecnología de memoria actual usa una señal de sincronización para realizar las funciones de lectura-escritura de manera que siempre esta sincronizada con un reloj del bus de memoria, a diferencia de las antiguas memorias FPM y EDO que eran asíncronas. Hace más de una década toda la industria se decantó por las tecnologías síncronas, ya que permiten construir integrados que funcionen a una frecuencia superior a 66 Mhz (A día de hoy, se han superado con creces los 1600 Mhz).
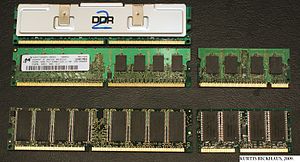
Memorias RAM con tecnologías usadas en la actualidad. SDR SDRAM
Memoria síncrona, con tiempos de acceso de entre 25 y 10 ns y que se presentan en módulos DIMM de 168 contactos. Fue utilizada en los Pentium II y en los Pentium III , así como en los AMD K6, AMD Athlon K7 y Duron. Está muy extendida la creencia de que se llama SDRAM a secas, y que la denominación SDR SDRAM es para diferenciarla de la memoria DDR, pero no es así, simplemente se extendió muy rápido la denominación incorrecta. El nombre correcto es SDR SDRAM ya que ambas (tanto la SDR como la DDR) son memorias síncronas dinámicas. Los tipos disponibles son:
- PC100: SDR SDRAM, funciona a un máx de 100 MHz.
- PC133: SDR SDRAM, funciona a un máx de 133 MHz.
DDR SDRAM
Memoria síncrona, envía los datos dos veces por cada ciclo de reloj. De este modo trabaja al doble de velocidad del bus del sistema, sin necesidad de aumentar la frecuencia de reloj. Se presenta en módulos DIMM de 184 contactos. Los tipos disponibles son:
- PC2100 o DDR 266: funciona a un máx de 133 MHz.
- PC2700 o DDR 333: funciona a un máx de 166 MHz.
- PC3200 o DDR 400: funciona a un máx de 200 MHz.
DDR2 SDRAM
Las memorias DDR 2 son una mejora de las memorias DDR (Double Data Rate), que permiten que los búferes de entrada/salida trabajen al doble de la frecuencia del núcleo, permitiendo que durante cada ciclo de reloj se realicen cuatro transferencias. Se presentan en módulos DIMM de 240 contactos. Los tipos disponibles son:
- PC2-4200 o DDR2-533: funciona a un máx de 533 MHz.
- PC2-5300 o DDR2-667: funciona a un máx de 667 MHz.
- PC2-6400 o DDR2-800: funciona a un máx de 800 MHz.
- PC2-8600 o DDR2-1066: funciona a un máx de 1066 MHz.
DDR3 SDRAM
Las memorias DDR 3 son una mejora de las memorias DDR 2, proporcionan significantes mejoras en el rendimiento en niveles de bajo voltaje, lo que lleva consigo una disminución del gasto global de consumo. Los módulos DIMM DDR 3 tienen 240 pines, el mismo número que DDR 2; sin embargo, los DIMMs son físicamente incompatibles, debido a una ubicación diferente de la muesca. Los tipos disponibles son:
- PC3-8600 o DDR3-1066: funciona a un máx de 1066 MHz.
- PC3-10600 o DDR3-1333: funciona a un máx de 1333 MHz.
- PC3-12800 o DDR3-1600: funciona a un máx de 1600 MHz.
RD RAM (Rambus DRAM)
Artículo principal: RDRAM Memoria de gama alta basada en un protocolo propietario creado por la empresa Rambus, lo cual obliga a sus compradores a pagar regalías en concepto de uso. Esto ha hecho que el mercado se decante por la tecnología DDR, libre de patentes, excepto algunos servidores de grandes prestaciones (Cray) y la consola PlayStation 3. La RDRAM se presenta en módulos RIMM de 184 contactos.
MEMORIA ROM
La memoria ROM, (read-only memory) o memoria de sólo lectura, es la memoria que se utiliza para almacenar los programas que ponen en marcha el ordenador y realizan los diagnósticos. La memoria ROM es aquella memoria de almacenamiento que permite sólo la lectura de la información y no su destrucción, independientemente de la presencia o no de una fuente de energía que la alimente.
La memoria de sólo lectura o ROM (acrónimo en inglés de read-only memory) es una clase de medio de almacenamiento utilizado en ordenadores y otros dispositivos electrónicos. Los datos almacenados en la ROM no se pueden modificar -al menos no de manera rápida o fácil- y se utiliza principalmente para contener el firmware (programa que está estrechamente ligado a hardware específico, y es poco probable que requiera actualizaciones frecuentes) u otro contenido vital para el funcionamiento del dispositivo.
En su sentido más estricto, se refiere sólo a máscara ROM -en inglés MROM- (el más antiguo tipo de estado sólido ROM), que se fabrica con los datos almacenados de forma permanente, y por lo tanto, su contenido no puede ser modificado. Sin embargo, las ROM más modernas, como EPROM y Flash EEPROM se pueden borrar y volver a programar varias veces, aún siendo descritos como "memoria de sólo lectura (ROM), porque el proceso de reprogramación en general es poco frecuente, relativamente lento y, a menudo, no se permite la escritura en lugares aleatorios de la memoria. A pesar de la simplicidad de la ROM, los dispositivos reprogramables son más flexibles y económicos, por dicha razón, las máscaras ROM no se suelen encontrar en hardware producido a partir de 2007.
Uso de la ROM para almacenamiento de software
Los ordenadores domésticos a comienzos de los años 1980] venían con todo su sistema operativo en ROM. No había otra alternativa razonable ya que las unidades de disco eran generalmente opcionales. La actualización a una nueva versión significa usar un soldador o un grupo de interruptores DIP y reemplazar el viejo chip de ROM por uno nuevo. Actualmente los sistemas operativos en general ya no van en ROM. Todavía los ordenadores pueden dejar algunos de sus programas en memoria ROM, pero incluso en este caso, es más frecuente que vaya en memoria flash. Los teléfonos móviles y los asistentes personales digitales (PDA) suelen tener programas en memoria ROM (o por lo menos en memoria flash).
Algunas de las videoconsolas que usan programas basados en la memoria ROM son la Super Nintendo, la Nintendo 64, la Sega Mega Drive o la Game Boy. Estas memorias ROM, pegadas a cajas de plástico aptas para ser utilizadas e introducidas repetidas veces, son conocidas como cartuchos. Por extensión la palabra ROM puede referirse también a un archivo de datos que contenga una imagen del programa que se distribuye normalmente en memoria ROM, como una copia de un cartucho de videojuego.
Una razón de que todavía se utilice la memoria ROM para almacenar datos es la velocidad ya que los discos son más lentos. Aún más importante, no se puede leer un programa que es necesario para ejecutar un disco desde el propio disco. Por lo tanto, la BIOS, o el sistema de arranque oportuno del PC normalmente se encuentran en una memoria ROM.
Velocidad de la Rom
Velocidad de lectura
Aunque la velocidad relativa de las memorias RAM y ROM ha variado con el tiempo, desde el año 2007 la memoria de acceso aleatorio es más rápida para la lectura que la mayoría de las memorias ROM, por lo tanto el contenido ROM se suele traspasar normalmente a la memoria RAM cuando se utiliza.
Velocidad de escritura
Para esos tipos de ROM que puedan ser modificados eléctricamente, la velocidad es mucho más lenta que la velocidad de lectura, y puede requerir excepcionalmente alto voltaje.
MICROPOSESADOR
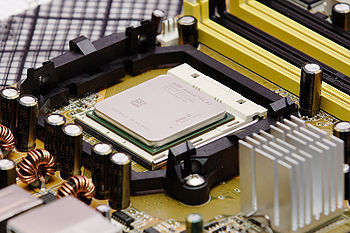
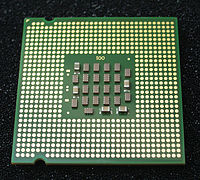
Uno de los actuales microprocesadores de 64 bits y doble núcleo, un AMD Athlon 64 X2 3600. Desde el punto de vista funcional, un microprocesador es un circuito integrado que incorpora en su interior una unidad central de proceso (CPU) y todo un conjunto de elementos lógicos que permiten enlazar otros dispositivos como memorias y puertos de entrada y salida (I/O), formando un sistema completo para cumplir con una aplicación específica dentro del mundo real. Para que el sistema pueda realizar su labor debe ejecutar paso a paso un programa que consiste en una secuencia de números binarios o instrucciones, almacenándolas en uno o más elementos de memoria, generalmente externos al mismo. La aplicación más importante de los microprocesadores que cambió totalmente la forma de trabajar, ha sido la computadora personal o microcomputadora.
El microprocesador o simplemente procesador, es el circuito integrado más importante, de tal modo, que se le considera el cerebro de una computadora. Está constituido por millones de transistores integrados. Puede definirse como chip, un tipo de componente electrónico en cuyo interior existen miles o en ocasiones millones, según su complejidad, de elementos llamados transistores cuyas interacciones permiten realizar las labores o funciones que tenga encomendado el chip.
Así mismo, es la parte de la computadora diseñada para llevar a cabo o ejecutar los programas. Éste ejecuta instrucciones que se le dan a la computadora a muy bajo nivel realizando operaciones lógicas simples, como sumar, restar, multiplicar o dividir. Se ubica generalmente en un zócalo específico en la placa o tarjeta madre y dispone para su correcto y estable funcionamiento de un sistema de refrigeración (generalmente de un ventilador montado sobre un disipador de metal termicamente muy conductor).
Lógicamente funciona como la unidad central de procesos (CPU/Central Procesing Unit), que está constituida por registros, la unidad de control y la unidad aritmético-lógica principalmente. En el microprocesador se procesan todas las acciones de la computadora.
Su "velocidad" se determina por la cantidad de operaciones por segundo que puede realizar: también denominada frecuencia de reloj. La frecuencia de reloj se mide Hertzios, pero dado su elevado número se utilizan los múltiplos megahertzio o gigahertzio
Una computadora personal o más avanzada puede estar soportada por uno o varios microprocesadores, y un microprocesador puede soportar una o varias terminales (redes). Un núcleo suele referirse a una porción del procesador que realiza todas las actividades de una CPU real.
La tendencia de los últimos años ha sido la de integrar múltiples núcleos dentro de un mismo encapsulado, además de componentes como memorias caché, controladoras de memoria e incluso unidades de procesamiento gráfico; elementos que anteriormente estaban montados sobre la placa base como dispositivos individuales
Funcionamiento
Desde el punto de vista lógico, singular y funcional, el microprocesador está compuesto básicamente por: varios registros, una unidad de control, una unidad aritmético-lógica, y dependiendo del procesador, puede contener una unidad en coma flotante.
El microprocesador ejecuta instrucciones almacenadas como números binarios organizados secuencialmente en la memoria principal. La ejecución de las instrucciones se puede realizar en varias fases:
- PreFetch, pre lectura de la instrucción desde la memoria principal.
- Fetch, envío de la instrucción al decodificador
- Decodificación de la instrucción, es decir, determinar qué instrucción es y por tanto qué se debe hacer.
- Lectura de operandos (si los hay).
- Ejecución, lanzamiento de las máquinas de estado que llevan a cabo el procesamiento.
- Escritura de los resultados en la memoria principal o en los registros.
Cada una de estas fases se realiza en uno o varios ciclos de CPU, dependiendo de la estructura del procesador, y concretamente de su grado de segmentación. La duración de estos ciclos viene determinada por la frecuencia de reloj, y nunca podrá ser inferior al tiempo requerido para realizar la tarea individual (realizada en un solo ciclo) de mayor coste temporal. El microprocesador se conecta a un circuito PLL, normalmente basado en un cristal de cuarzo capaz de generar pulsos a un ritmo constante, de modo que genera varios ciclos (o pulsos) en un segundo. Este reloj, en la actualidad, genera miles de MHz. Un microprocesador es un sistema abierto con el que puede construirse un computador con las características que se desee acoplándole los módulos necesarios.
Rendimiento
El rendimiento del procesador puede ser medido de distintas maneras, hasta hace pocos años se creía que la frecuencia de reloj era una medida precisa, pero ese mito, conocido como "mito de los megahertzios" se ha visto desvirtuado por el hecho de que los procesadores no han requerido frecuencias más altas para aumentar su potencia de cómputo.
Durante los últimos años esa frecuencia se ha mantenido en el rango de los 1,5 GHz a 4 GHz, dando como resultado procesadores con capacidades de proceso mayores comparados con los primeros que alcanzaron esos valores. Además la tendencia es a incorporar más núcleos dentro de un mismo encapsulado para aumentar el rendimiento por medio de una computación paralela, de manera que la velocidad de reloj es un indicador menos fiable aún.
Medir el rendimiento con la frecuencia es válido únicamente entre procesadores con arquitecturas muy similares o iguales, de manera que su funcionamiento interno sea el mismo: en ese caso la frecuencia es un índice de comparación válido. Dentro de una familia de procesadores es común encontrar distintas opciones en cuanto a frecuencias de reloj, debido a que no todos los chip de silicio tienen los mismos límites de funcionamiento: son probados a distintas frecuencias, hasta que muestran signos de inestabilidad, entonces se clasifican de acuerdo al resultado de las pruebas.
Esto se podría reducir en que los procesadores son fabricados por lotes con diferentes estructuras internas atendidendo a gamas y extras como podría ser una memoria caché de diferente tamaño, aunque no siempre es así y las gamas altas difieren muchísimo más de las bajas que simplemente de su memoria caché. Después de obtener los lotes según su gama, se someten a procesos en un banco de pruebas, y según su soporte a las temperaturas o que vaya mostrando signos de inestabilidad, se le adjudica una frecuencia, con la que vendrá programado de serie, pero con prácticas de overclock se le puede incrementar
La capacidad de un procesador depende fuertemente de los componentes restantes del sistema, sobre todo del chipset, de la memoria RAM y del software. Pero obviando esas características puede tenerse una medida aproximada del rendimiento de un procesador por medio de indicadores como la cantidad de operaciones de coma flotante por unidad de tiempo FLOPS, o la cantidad de instrucciones por unidad de tiempo MIPS. Una medida exacta del rendimiento de un procesador o de un sistema, es muy complicada debido a los múltiples factores involucrados en la computación de un problema, por lo general las pruebas no son concluyentes entre sistemas de la misma generación.
Arquitectura
El microprocesador tiene una arquitectura parecida a la computadora digital. En otras palabras, el microprocesador es como la computadora digital porque ambos realizan cálculos bajo un programa de control. Consiguientemente, la historia de la computadora digital nos ayudará a entender el microprocesador. El microprocesador hizo posible la fabricación de potentes calculadoras y de muchos otros productos. El microprocesador utiliza el mismo tipo de lógica que es usado en la unidad procesadora central (CPU) de una computadora digital. El microprocesador es algunas veces llamado unidad microprocesadora (MPU). En otras palabras, el microprocesador es una unidad procesadora de datos. En un microprocesador podemos diferenciar diversas partes:
- El encapsulado: es lo que rodea a la oblea de silicio en si, para darle consistencia, impedir su deterioro (por ejemplo, por oxidación por el aire) y permitir el enlace con los conectores externos que lo acoplaran a su zócalo a su placa base.
- La memoria cache: es una memoria ultrarrápida que emplea el micro para tener a mano ciertos datos que predeciblemente serán utilizados en las siguientes operaciones sin tener que acudir a la memoria RAM reduciendo el tiempo de espera. Por ejemplo: en una biblioteca, en lugar de estar buscando cierto libro a través de un banco de ficheros de papel se utiliza la computadora, y gracias a la memoria cache, obtiene de manera rápida la información. Todos los micros compatibles con PC poseen la llamada cache interna de primer nivel o L1; es decir, la que está más cerca del micro, tanto que está encapsulada junto a él. Los micros más modernos (Pentium III Coppermine, athlon Thunderbird, etc.) incluyen también en su interior otro nivel de caché, más grande aunque algo menos rápida, la caché de segundo nivel o L2 e incluso memoria caché de nivel 3, o L3.
- Coprocesador Matemático: o correctamente la FPU (Unidad de coma flotante). Que es la parte del micro especializada en esa clase de cálculos matemáticos, antiguamente estaba en el exterior del procesador en otro chip. Esta parte esta considerada como una parte "lógica" junto con los registros, la unidad de control, memoria y bus de datos.
- Los registros: son básicamente un tipo de memoria pequeña con fines especiales que el micro tiene disponible para algunos usos particulares. Hay varios grupos de registros en cada procesador. Un grupo de registros esta diseñado para control del programador y hay otros que no son diseñados para ser controlados por el procesador pero que CPU los utiliza en algunas operaciones, en total son treinta y dos registros.
- La memoria: es el lugar donde el procesador encuentra las instrucciones de los programas y sus datos. Tanto los datos como las instrucciones están almacenados en memoria, y el procesador las toma de ahí. La memoria es una parte interna de la computadora y su función esencial es proporcionar un espacio de trabajo para el procesador.
- Puertos: es la manera en que el procesador se comunica con el mundo externo. Un puerto es parecido a una línea de teléfono. Cualquier parte de la circuitería de la computadora con la cual el procesador necesita comunicarse, tiene asignado un número de puerto que el procesador utiliza como un número de teléfono para llamar al circuito o a partes especiales.
Fabricación
El proceso de fabricación de un microprocesador es muy complejo. Todo comienza con un buen puñado de arena (compuesta básicamente de silicio), con la que se fabrica un monocristal de unos 20 x 150 centímetros. Para ello, se funde el material en cuestión a alta temperatura (1.370 °C) y muy lentamente (10 a 40 Mm por hora) se va formando el cristal.
De este cristal, de cientos de kilos de peso, se cortan los extremos y la superficie exterior, de forma de obtener un cilindro perfecto. Luego, el cilindro se corta en obleas de 10 micras de espesor, la décima parte del espesor de un cabello humano, utilizando una sierra de diamante. De cada cilindro se obtienen miles de obleas, y de cada oblea se fabricarán varios cientos de microprocesadores.
Estas obleas son pulidas hasta obtener una superficie perfectamente plana, pasan por un proceso llamado “annealing”, que consiste en someterlas a un calentamiento extremo para remover cualquier defecto o impureza que pueda haber llegado a esta instancia. Después de una supervisión mediante láseres capaz de detectar imperfecciones menores a una milésima de micra, se recubren con una capa aislante formada por óxido de silicio transferido mediante deposición de vapor.
De aquí en adelante, comienza el proceso del “dibujado” de los transistores que conformarán a cada microprocesador. A pesar de ser muy complejo y preciso, básicamente consiste en la “impresión” de sucesivas máscaras sobre la oblea, sucediéndose la deposición y eliminación de capas finísimas de materiales conductores, aislantes y semiconductores, endurecidas mediante luz ultravioleta y atacada por ácidos encargados de remover las zonas no cubiertas por la impresión. Salvando las escalas, se trata de un proceso comparable al visto para la fabricación de circuitos impresos. Después de cientos de pasos, entre los que se hallan la creación de sustrato, la oxidación, la litografía, el grabado, la implantación iónica y la deposición de capas; se llega a un complejo "bocadillo" que contiene todos los circuitos interconectados del microprocesador.
Un transistor construido en tecnología de 45 nanómetros tiene un ancho equivalente a unos 200 electrones. Eso da una idea de la precisión absoluta que se necesita al momento de aplicar cada una de las mascaras utilizadas durante la fabricación.

Una oblea de silicio grabada Los detalles de un microprocesador son tan pequeños y precisos que una única mota de polvo puede destruir todo un grupo de circuitos. Las salas empleadas para la fabricación de microprocesadores se denominan salas limpias, porque el aire de las mismas se somete a un filtrado exhaustivo y está prácticamente libre de polvo. Las salas limpias más puras de la actualidad se denominan de clase 1. La cifra indica el número máximo de partículas mayores de 0,12 micras que puede haber en un pie cúbico (0,028 m3) de aire. Como comparación, un hogar normal sería de clase 1 millón. Los trabajadores de estas plantas emplean trajes estériles para evitar que restos de piel, polvo o pelo se desprendan de sus cuerpos.
Una vez que la oblea ha pasado por todo el proceso litográfico, tiene “grabados” en su superficie varios cientos de microprocesadores, cuya integridad es comprobada antes de cortarlos. Se trata de un proceso obviamente automatizado, y que termina con una oblea que tiene grabados algunas marcas en el lugar que se encuentra algún microprocesador defectuoso.
La mayoría de los errores se dan en los bordes de la oblea, dando como resultados chips capaces de funcionar a velocidades menores que los del centro de la oblea o simplemente con características desactivadas, tales como núcleos. Luego la oblea es cortada y cada chip individualizado. En esta etapa del proceso el microprocesador es una pequeña placa de unos pocos milímetros cuadrados, sin pines ni cápsula protectora.
Cada una de estas plaquitas será dotada de una cápsula protectora plástica (en algunos casos pueden ser cerámicas) y conectada a los cientos de pines metálicos que le permitirán interactuar con el mundo exterior. Cada una de estas conexiones se realiza utilizando delgadísimos alambres, generalmente de oro. De ser necesario, la cápsula es dotada de un pequeño disipador térmico de metal, que servirá para mejorar la transferencia de calor desde el interior del chip hacia el disipador principal. El resultado final es un microprocesador como el que equipa nuestro ordenador.
Empaquetado
Empaquetado de un procesador Intel 80486 en un empaque de cerámica. Los microprocesadores son circuitos integrados y como tal están formados por un chip de silicio y un empaque con conexiones eléctricas. En los primeros procesadores el empaque se fabricaba con plásticos epoxicos o con cerámicas en formatos como el DIP entre otros. El chip se pegaba con un material térmicamente conductor a una base y se conectaba por medio de pequeños alambres a unas pistas terminadas en pines. Posteriormente se sellaba todo con una placa metálica u otra pieza del mismo material de la base de manera que los alambres y el silicio quedaran encapsulados.
En procesadores como los Intel y AMD de las series Pentium I (mediados de los 90) y compatibles aún se usaba el empaque cerámico que tenía un arreglo de pines PGA y una cavidad en el espacio de ese arreglo, donde se introducía el chip del procesador y se soldaba con pequeños alambres a los pines. La cavidad se sellaba con una lamina de cobre.

Empaquetado de un procesador PowerPC con Flip-Chip, se ve el chip de silicio. En la actualidad los microprocesadores de diversos tipos (incluyendo procesadores gráficos) se ensamblan por medio de la tecnología Flip chip. El chip semiconductor es soldado directamente a un arreglo de pistas conductoras (en el sustrato laminado) con la ayuda de unas microesferas que se depositan sobre las obleas de semiconductor en las etapas finales de su fabricación. El sustrato laminado es una especie de circuito impreso que posee pistas conductoras hacia pines o contactos, que a su vez servirán de conexión entre el chip semiconductor y un socket de CPU o una placa base.<4>
Antiguamente las conexión del chip con los pines se realizaba por medio de microalambres de manera que quedaba boca arriba, con el método Flip Chip queda boca abajo, de ahí se deriva su nombre. Entre las ventajas de este método esta la simplicidad del ensamble y en una mejor disipación de calor. Cuando la pastilla queda bocabajo presenta el sustrato base de silicio de manera que puede ser enfriado directamente por medio de elementos conductores de calor. Esta superficie se aprovecha también para etiquetar el integrado. En los procesadores para computadores de escritorio, dada la vulnerabilidad de la pastilla de silicio, se opta por colocar una placa de metal, por ejemplo en los procesadores Athlon como el de la primera imagen. En los procesadores de Intel también se incluye desde el Pentium III de más de 1 Ghz.
Disipación de calor
Con el aumento en el número de transistores incluidos en un procesador, el consumo de energía se ha elevado a niveles en los cuales la disipación natural del procesador no es suficiente para mantener temperaturas aceptables en el material semiconductor, de manera que se hace necesario el uso de mecanismos de enfriamiento forzado, como son los disipadores de calor.
Entre ellos se encuentran los sistemas sencillos como disipadores metálicos que aumentan el área de radiación, permitiendo que la energía salga rápidamente del sistema. También los hay con refrigeración líquida, por medio de circuitos cerrados.
En los procesadores más modernos se aplica en la parte superior del procesador, una lámina metálica denominada IHS que va a ser la superficie de contacto del disipador para mejorar la refrigeración uniforme del die y proteger las resistencias internas de posibles tomas de contacto al aplicar pasta térmica. Varios modelos de procesadores, en especial, los Athlon XP, han sufrido cortocircuitos debido a una incorrecta aplicación de la pasta térmica.
Conexión con el exterior
Superficies de contacto en un procesador Intel para Zocalo LGA775. El microprocesador posee un arreglo de elementos metálicos (pines, patillas, esferas, contactos) que permiten la conexión eléctrica entre el circuito integrado que conforma el microprocesador y los circuitos de la placa base. Dependiendo de la complejidad y de la potencia, un procesador puede tener desde 8 hasta más de 2000 elementos metálicos en la superficie de su empaque. El montaje del procesador se realiza con la ayuda de un Zócalo de CPU soldado sobre la placa base. Entre las conexiones eléctricas están las de alimentación eléctrica de los circuitos dentro del empaque, las señales de reloj, señales relacionadas con datos, direcciones y control; estas funciones están distribuidas en un esquema asociado al zócalo, de manera que varias referencias de procesador y placas base son compatibles entre ellos, permitiendo distintas configuraciones.
Sistema Operativo.

Un Sistema operativo (SO) es un software que actúa de interfaz entre los dispositivos de hardware y los programas usados por el usuario para utilizar un computador.[1] Es responsable de gestionar, coordinar las actividades y llevar a cabo el intercambio de los recursos y actúa como estación para las aplicaciones que se ejecutan en la máquina.
Nótese que es un error común muy extendido denominar al conjunto completo de herramientas sistema operativo, pues este, es sólo el núcleo y no necesita de entorno operador para estar operativo y funcional.[2] [3] Uno de los más prominentes ejemplos de esta diferencia, es el SO Linux,[4] el cual junto a las herramientas GNU, forman las llamadas distribuciones Linux.
Este error de precisión, se debe a la modernización de la informática llevada a cabo a finales de los 80, cuando la filosofía de estructura básica de funcionamiento de los grandes computadores[5] se rediseñó a fin de llevarla a los hogares y facilitar su uso, cambiando el concepto de computador multiusuario, (muchos usuarios al mismo tiempo) por un sistema monousuario (únicamente un usuario al mismo tiempo) más sencillo de gestionar.[6] (Véase AmigaOS, beOS o MacOS como los pioneros[7] de dicha modernización, cuando los Amiga, fueron bautizados con el sobrenombre de Video Toasters[8] por su capacidad para la Edición de vídeo en entorno multitarea round robin, con gestión de miles de colores e interfaces intuitivos para diseño en 3D con programas como Imagine[9] o Scala multimedia, entre muchos otros.)[10]
Uno de los propósitos de un sistema operativo como programa estación principal, consiste en gestionar los recursos de localización y protección de acceso del hardware, hecho que alivia a los programadores de aplicaciones de tener que tratar con estos detalles. Se encuentran en la mayoría de los aparatos electrónicos que utilizan microprocesadores para funcionar. (teléfonos móviles, reproductores de DVD, computadoras, radios, etc.)
Parte de la infraestructura de la World Wide Web está compuesta por el Sistema Operativo de Internet, creado por Cisco Systems para gestionar equipos de interconexión como los conmutadores y los enrutadores.[11]
Tipos de Sistema operativo.
1) DOS: La razón de su continua popularidad se debe al aplastante volumen de software disponible y a la base instalada de computadoras con procesador Intel.
Cuando Intel liberó el 80286, DOS se hizo tan popular y firme en el mercado que DOS y las aplicaciones DOS representaron la mayoría del mercado de software para PC. En aquel tiempo, la compatibilidad IBM, fue una necesidad para que los productos tuvieran éxito, y la "compatibilidad IBM" significaba computadoras que corrieran DOS tan bien como las computadoras IBM lo hacían.
Aún con los nuevos sistemas operativos que han salido al mercado, todavía el DOS es un sólido contendiente en la guerra de los SO.
2) Windows 3.1:
3) Windows 95:
4) Windows NT:
5) OS/2:
6) Mac OS:
7) UNIX
: El sistema operativo UNIX fue creado por los laboratorios Bell de AT&T en 1969 y es ahora usado como una de las bases para la supercarretera de la información. Unix es un SO multiusuario y multitarea, que corre en diferentes computadoras, desde supercomputadoras, Mainframes, Minicomputadoras, computadoras personales y estaciones de trabajo. Esto quiere decir que muchos usuarios puede estar usando una misma computadora por medio de terminales o usar muchas de ellas. Las computadoras Macintosh no serían tan populares como lo son si no tuvieran el Mac OS como sistema operativo de planta. Este sistema operativo es tan amigable para el usuario que cualquier persona puede aprender a usarlo en muy poco tiempo. Por otro lado, es muy bueno para organizar archivos y usarlos de manera eficaz. Este fue creado por Apple Computer, Inc. Este SO fue hecho por IBM. Tiene soporte de 32 bits y su interfaz es muy buena. El problema que presenta este sistema operativo es que no se le ha dad el apoyo que se merece en cuanto a aplicaciones se refiere. Es decir, no se han creado muchas aplicaciones que aprovechen las características de el SO, ya que la mayoría del mercado de software ha sido monopolizado por Windows. Esta versión de Windows se especializa en las redes y servidores. Con este SO se puede interactuar de forma eficaz entre dos o más computadoras. En 1995, Microsoft introdujo una nueva y mejorada versión del Windows 3.1. Las mejoras de este SO incluyen soporte multitareas y arquitectura de 32 bits, permitiendo así correr mejores aplicaciónes para mejorar la eficacia del trabajo. Microsoft tomo una decisión, hacer un sistema operativo que tuviera una interfaz gráfica amigable para el usuario, y como resultado obtuvo Windows. Este sistema muestra íconos en la pantalla que representan diferentes archivos o programas, a los cuales se puede accesar al darles doble click con el puntero del mouse. Todas las aplicaciones elaboradas para Windows se parecen, por lo que es muy fácil aprender a usar nuevo software una vez aprendido las bases. El famoso DOS, que quiere decir Disk Operating System (sistema operativo de disco), es más conocido por los nombres de PC-DOS y MS-DOS. MS-DOS fue hecho por la compañía de software Microsoft y es en esencia el mismo SO que el PC-DOS. 1) DOS: El famoso DOS, que quiere decir Disk Operating System (sistema operativo de disco), es más conocido por los nombres de PC-DOS y MS-DOS. MS-DOS fue hecho por la compañía de software Microsoft y es en esencia el mismo SO que el PC-DOS.
La razón de su continua popularidad se debe al aplastante volumen de software disponible y a la base instalada de computadoras con procesador Intel.
Cuando Intel liberó el 80286, DOS se hizo tan popular y firme en el mercado que DOS y las aplicaciones DOS representaron la mayoría del mercado de software para PC. En aquel tiempo, la compatibilidad IBM, fue una necesidad para que los productos tuvieran éxito, y la "compatibilidad IBM" significaba computadoras que corrieran DOS tan bien como las computadoras IBM lo hacían.
Aún con los nuevos sistemas operativos que han salido al mercado, todavía el DOS es un sólido contendiente en la guerra de los SO.
2) Windows 3.1:
Microsoft tomo una decisión, hacer un sistema operativo que tuviera una interfaz gráfica amigable para el usuario, y como resultado obtuvo Windows. Este sistema muestra íconos en la pantalla que representan diferentes archivos o programas, a los cuales se puede accesar al darles doble click con el puntero del mouse. Todas las aplicaciones elaboradas para Windows se parecen, por lo que es muy fácil aprender a usar nuevo software una vez aprendido las bases.
3) Windows 95:
4) Windows NT:
Esta versión de Windows se especializa en las redes y servidores. Con este SO se puede interactuar de forma eficaz entre dos o más computadoras.
5) OS/2: Este SO fue hecho por IBM. Tiene soporte de 32 bits y su interfaz es muy buena. El problema que presenta este sistema operativo es que no se le ha dad el apoyo que se merece en cuanto a aplicaciones se refiere. Es decir, no se han creado muchas aplicaciones que aprovechen las características de el SO, ya que la mayoría del mercado de software ha sido monopolizado por Windows.
6) Mac OS:
Las computadoras Macintosh no serían tan populares como lo son si no tuvieran el Mac OS como sistema operativo de planta. Este sistema operativo es tan amigable para el usuario que cualquier persona puede aprender a usarlo en muy poco tiempo. Por otro lado, es muy bueno para organizar archivos y usarlos de manera eficaz. Este fue creado por Apple Computer, Inc.
unix: El sistema operativo UNIX fue creado por los laboratorios Bell de AT&T en 1969 y es ahora usado como una de las bases para la supercarretera de la información. Unix es un SO multiusuario y multitarea, que corre en diferentes computadoras, desde supercomputadoras, Mainframes, Minicomputadoras, computadoras personales y estaciones de trabajo. Esto quiere decir que muchos usuarios puede estar usando una misma computadora por medio de terminales o usar muchas de ellas.
Problemas de explotación y soluciones iniciales
El problema principal de los primeros sistemas era la baja utilización de los mismos, la primera solución fue poner un operador profesional que lo manejase, con lo que se eliminaron las hojas de reserva, se ahorró tiempo y se aumentó la velocidad.
Para ello, los trabajos se agrupaban de forma manual en lotes mediante lo que se conoce como procesamiento por lotes (batch) sin automatizar.
Monitores residentes
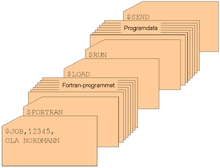
Fichas en lenguaje de procesamiento por lotes, con programa y datos, para ejecución secuencial. Según fue avanzando la complejidad de los programas, fue necesario implementar soluciones que automatizaran la organización de tareas sin necesidad de un operador. Debido a ello se crearon los monitores residentes: programas que residían en memoria y que gestionaban la ejecución de una cola de trabajos.
Un monitor residente estaba compuesto por un cargador, un Intérprete de comandos y un Controlador (drivers) para el manejo de entrada/salida.
Sistemas con almacenamiento temporal de E/S
Los avances en el hardware crearon el soporte de interrupciones y posteriormente se llevó a cabo un intento de solución más avanzado: solapar la E/S de un trabajo con sus propios cálculos, por lo que se creó el sistema de buffers con el siguiente funcionamiento:
- Un programa escribe su salida en un área de memoria (buffer 1).
- El monitor residente inicia la salida desde el buffer y el programa de aplicación calcula depositando la salida en el buffer 2.
- La salida desde el buffer 1 termina y el nuevo cálculo también.
- Se inicia la salida desde el buffer 2 y otro nuevo cálculo dirige su salida al buffer 1.
- El proceso se puede repetir de nuevo.
Los problemas surgen si hay muchas más operaciones de cálculo que de E/S (limitado por la CPU) o si por el contrario hay muchas más operaciones de E/S que cálculo (limitado por la E/S).
Spoolers
Hace aparición el disco magnético con lo que surgen nuevas soluciones a los problemas de rendimiento. Se eliminan las cintas magnéticas para el volcado previo de los datos de dispositivos lentos y se sustituyen por discos (un disco puede simular varias cintas). Debido al solapamiento del cálculo de un trabajo con la E/S de otro trabajo se crean tablas en el disco para diferentes tareas, lo que se conoce como Spool (Simultaneous Peripherial Operation On-Line).
Sistemas operativos multiprogramados
Surge un nuevo avance en el hardware: el hardware con protección de memoria. Lo que ofrece nuevas soluciones a los problemas de rendimiento:
- Se solapa el cálculo de unos trabajos con la entrada/salida de otros trabajos.
- Se pueden mantener en memoria varios programas.
- Se asigna el uso de la CPU a los diferentes programas en memoria.
Debido a los cambios anteriores, se producen cambios en el monitor residente, con lo que éste debe abordar nuevas tareas, naciendo lo que se denomina como Sistemas Operativos multiprogramados, los cuales cumplen con las siguientes funciones:
- Administrar la memoria.
- Gestionar el uso de la CPU (planificación).
- Administrar el uso de los dispositivos de E/S.
Cuando desempeña esas tareas, el monitor residente se transforma en un sistema operativo multiprogramado.
Llamadas al sistema operativo
Definición breve: llamadas que ejecutan los programas de aplicación para pedir algún servicio al SO.
Cada SO implementa un conjunto propio de llamadas al sistema. Ese conjunto de llamadas es la interfaz del SO frente a las aplicaciones. Constituyen el lenguaje que deben usar las aplicaciones para comunicarse con el SO. Por ello si cambiamos de SO, y abrimos un programa diseñado para trabajar sobre el anterior, en general el programa no funcionará, a no ser que el nuevo SO tenga la misma interfaz. Para ello:
- Las llamadas correspondientes deben tener el mismo formato.
- Cada llamada al nuevo SO tiene que dar los mismos resultados que la correspondiente del anterior.
Modos de ejecución en un CPU
Las aplicaciones no deben poder usar todas las instrucciones de la CPU. No obstante el Sistema Operativo, tiene que poder utilizar todo el juego de instrucciones del CPU. Por ello, una CPU debe tener (al menos) dos modos de operación diferentes:
- Modo usuario: el CPU podrá ejecutar sólo las instrucciones del juego restringido de las aplicaciones.
- Modo supervisor: la CPU debe poder ejecutar el juego completo de instrucciones.
Llamadas al sistema
Una aplicación, normalmente no sabe dónde está situada la rutina de servicio de la llamada. Por lo que si ésta se codifica como una llamada de función, cualquier cambio en el SO haría que hubiera que reconstruir la aplicación.
Pero lo más importante es que una llamada de función no cambia el modo de ejecución de la CPU. Con lo que hay que conseguir llamar a la rutina de servicio, sin tener que conocer su ubicación, y hacer que se fuerce un cambio de modo de operación de la CPU en la llamada (y la recuperación del modo anterior en el retorno).
Esto se hace utilizando instrucciones máquina diseñadas específicamente para este cometido, distintas de las que se usan para las llamadas de función.
Bibliotecas de interfaz de llamadas al sistema
Las llamadas al sistema no siempre tienen una expresión sencilla en los lenguajes de alto nivel, por ello se crean las bibliotecas de interfaz, que son bibliotecas de funciones que pueden usarse para efectuar llamadas al sistema. Las hay para distintos lenguajes de programación.
La aplicación llama a una función de la biblioteca de interfaz (mediante una llamada normal) y esa función es la que realmente hace la llamada al sistema.
Interrupciones y excepciones
El SO ocupa una posición intermedia entre los programas de aplicación y el hardware. No se limita a utilizar el hardware a petición de las aplicaciones ya que hay situaciones en las que es el hardware el que necesita que se ejecute código del SO. En tales situaciones el hardware debe poder llamar al sistema, pudiendo deberse estas llamadas a dos condiciones:
- Algún dispositivo de E/S necesita atención.
- Se ha producido una situación de error al intentar ejecutar una instrucción del programa (normalmente de la aplicación).
En ambos casos, la acción realizada no está ordenada por el programa de aplicación, es decir, no figura en el programa.
Según los dos casos anteriores tenemos las interrupciones y la excepciones:
- Interrupción: señal que envía un dispositivo de E/S a la CPU para indicar que la operación de la que se estaba ocupando, ya ha terminado.
- Excepción: una situación de error detectada por la CPU mientras ejecutaba una instrucción, que requiere tratamiento por parte del SO.
Tratamiento de las interrupciones
Una interrupción se trata en todo caso, después de terminar la ejecución de la instrucción en curso.
El tratamiento depende de cuál sea el dispositivo de E/S que ha causado la interrupción, ante la cual debe poder identificar el dispositivo que la ha causado.
La ventaja de este procedimiento es que no se tiene que perder tiempo ejecutando continuamente rutinas para consultar el estado del periférico. El inconveniente es que el dispositivo debe tener los circuitos electrónicos necesarios para acceder al sistema de interrupciones del computador.
Importancia de las interrupciones
El mecanismo de tratamiento de las interrupciones permite al SO utilizar la CPU en servicio de una aplicación, mientras otra permanece a la espera de que concluya una operación en un dispositivo de E/S.
El hardware se encarga de avisar al SO cuando el dispositivo de E/S ha terminado y el SO puede intervenir entonces, si es conveniente, para hacer que el programa que estaba esperando por el dispositivo, se continúe ejecutando.
En ciertos intervalos de tiempo puede convenir no aceptar señales de interrupción. Por ello las interrupciones pueden inhibirse por programa (aunque esto no deben poder hacerlo las mismas).
Un ejemplo de sincronismo por interrupción es el almacenamiento de caracteres introducidos mediante el teclado. Cuando se introduce un carácter, se codifica en el registro de datos del dispositivo y además se activa un bit del registro de estado quien crea una interrupción en el hardware. El procesador deja temporalmente la tarea que estaba completando y ejecuta la rutina de atención a la interrupción correspondiente. El teclado almacena el carácter en el vector de memoria intermedia ( también llamado buffer) asociada al teclado y despierta el proceso que había en el estado de espera de la operación de entrada/salida.
Excepciones
Cuando la CPU intenta ejecutar una instrucción incorrectamente construida, la unidad de control lanza una excepción para permitir al SO ejecutar el tratamiento adecuado. Al contrario que en una interrupción, la instrucción en curso es abortada. Las excepciones al igual que las interrupciones deben estar identificadas.
Clases de excepciones
Las instrucciones de un programa pueden estar mal construidas por diversas razones:
- El código de operación puede ser incorrecto.
- Se intenta realizar alguna operación no definida, como dividir por cero.
- La instrucción puede no estar permitida en el modo de ejecución actual.
- La dirección de algún operando puede ser incorrecta o se intenta violar alguno de sus permisos de uso.
Importancia de las excepciones
El mecanismo de tratamiento de las excepciones es esencial para impedir, junto a los modos de ejecución de la CPU y los mecanismos de protección de la memoria, que las aplicaciones realicen operaciones que no les están permitidas. En cualquier caso, el tratamiento específico de una excepción lo realiza el SO.
Como en el caso de las interrupciones, el hardware se limita a dejar el control al SO, y éste es el que trata la situación como convenga.
Es bastante frecuente que el tratamiento de una excepción no retorne al programa que se estaba ejecutando cuando se produjo la excepción, sino que el SO aborte la ejecución de ese programa. Este factor depende de la pericia del programador para controlar la excepción adecuadamente.
Componentes de un sistema operativo
Gestión de procesos
Un proceso es simplemente, un programa en ejecución que necesita recursos para realizar su tarea: tiempo de CPU, memoria, archivos y dispositivos de E/S. El SO es el responsable de:
- Crear y destruir los procesos.
- Parar y reanudar los procesos.
- Ofrecer mecanismos para que se comuniquen y sincronicen.
La gestión de procesos podría ser similar al trabajo de oficina. Se puede tener una lista de tareas a realizar y a estas fijarles prioridades alta, media, baja por ejemplo. Debemos comenzar haciendo las tareas de prioridad alta primero y cuando se terminen seguir con las de prioridad media y después las de baja. Una vez realizada la tarea se tacha. Esto puede traer un problema que las tareas de baja prioridad pueden que nunca lleguen a ejecutarse. y permanezcan en la lista para siempre. Para solucionar esto, se puede asignar alta prioridad a las tareas más antiguas.
Gestión de la memoria principal
La Memoria es una gran tabla de palabras o bytes que se referencian cada una mediante una dirección única. Este almacén de datos de rápido accesos es compartido por la CPU y los dispositivos de E/S, es volátil y pierde su contenido en los fallos del sistema. El SO es el responsable de:
- Conocer qué partes de la memoria están siendo utilizadas y por quién.
- Decidir qué procesos se cargarán en memoria cuando haya espacio disponible.
- Asignar y reclamar espacio de memoria cuando sea necesario.
Gestión del almacenamiento secundario
Un sistema de almacenamiento secundario es necesario, ya que la memoria principal (almacenamiento primario) es volátil y además muy pequeña para almacenar todos los programas y datos. También es necesario mantener los datos que no convenga mantener en la memoria principal. El SO se encarga de:
- Planificar los discos.
- Gestionar el espacio libre.
- Asignar el almacenamiento.
El sistema de E/S
Consiste en un sistema de almacenamiento temporal (caché), una interfaz de manejadores de dispositivos y otra para dispositivos concretos. El sistema operativo debe gestionar el almacenamiento temporal de E/S y servir las interrupciones de los dispositivos de E/S.
Sistema de archivos
Los archivos son colecciones de información relacionada, definidas por sus creadores. Éstos almacenan programas (en código fuente y objeto) y datos tales como imágenes, textos, información de bases de datos, etc. El SO es responsable de:
- Construir y eliminar archivos y directorios.
- Ofrecer funciones para manipular archivos y directorios.
- Establecer la correspondencia entre archivos y unidades de almacenamiento.
- Realizar copias de seguridad de archivos.
Existen diferentes Sistemas de Archivos, es decir, existen diferentes formas de organizar la información que se almacena en las memorias (normalmente discos) de los ordenadores. Por ejemplo, existen los sistemas de archivos FAT, FAT32, EXT2, NTFS, etc.
Desde el punto de vista del usuario estas diferencias pueden parecer insignificantes a primera vista, sin embargo, existen diferencias muy importantes. Por ejemplo, los sistemas de ficheros FAT32 y NTFS, que se utilizan fundamentalmente en sistemas operativos de Microsoft, tienen una gran diferencia para un usuario que utilice una base de datos con bastante información ya que el tamaño máximo de un fichero con un Sistema de Archivos FAT32 está limitado a 4 gigabytes, sin embargo, en un sistema NTFS el tamaño es considerablemente mayor.
Sistemas de protección
Mecanismo que controla el acceso de los programas o los usuarios a los recursos del sistema. El SO se encarga de:
- Distinguir entre uso autorizado y no autorizado.
- Especificar los controles de seguridad a realizar.
- Forzar el uso de estos mecanismos de protección.
Sistema de comunicaciones
Para mantener las comunicaciones con otros sistemas es necesario poder controlar el envío y recepción de información a través de las interfaces de red. También hay que crear y mantener puntos de comunicación que sirvan a las aplicaciones para enviar y recibir información, y crear y mantener conexiones virtuales entre aplicaciones que están ejecutándose localmente y otras que lo hacen remotamente.
Programas de sistema
Son aplicaciones de utilidad que se suministran con el SO pero no forman parte de él. Ofrecen un entorno útil para el desarrollo y ejecución de programas, siendo algunas de las tareas que realizan:
- Manipulación y modificación de archivos.
- Información del estado del sistema.
- Soporte a lenguajes de programación.
- Comunicaciones.
Gestor de recursos
Como gestor de recursos, el Sistema Operativo administra:
- La CPU (Unidad Central de Proceso, donde está alojado el microprocesador).
- Los dispositivos de E/S (entrada y salida)
- La memoria principal (o de acceso directo).
- Los discos (o memoria secundaria).
- Los procesos (o programas en ejecución).
- y en general todos los recursos del sistema.
Características
Administración de tareas
- Monotarea: Solamente puede ejecutar un proceso (aparte de los procesos del propio S.O.) en un momento dado. Una vez que empieza a ejecutar un proceso, continuará haciéndolo hasta su finalización y/o interrupción.
- Multitarea: Es capaz de ejecutar varios procesos al mismo tiempo. Este tipo de S.O. normalmente asigna los recursos disponibles (CPU, memoria, periféricos) de forma alternada a los procesos que los solicitan, de manera que el usuario percibe que todos funcionan a la vez, de forma concurrente.
Administración de usuarios
- Monousuario: Si sólo permite ejecutar los programas de un usuario al mismo tiempo.
- Multiusuario: Si permite que varios usuarios ejecuten simultáneamente sus programas, accediendo a la vez a los recursos de la computadora. Normalmente estos sistemas operativos utilizan métodos de protección de datos, de manera que un programa no pueda usar o cambiar los datos de otro usuario.
Manejo de recursos
- Centralizado: Si permite utilizar los recursos de una sola computadora.
- Distribuido: Si permite utilizar los recursos (memoria, CPU, disco, periféricos... ) de más de una computadora al mismo tiempo.
En 1995, Microsoft introdujo una nueva y mejorada versión del Windows 3.1. Las mejoras de este SO incluyen soporte multitareas y arquitectura de 32 bits, permitiendo así correr mejores aplicaciónes para mejorar la eficacia del trabajo.














{kind=link}

 Pensando en el intenso movimiento de los usuarios, los discos cuentan con un sensor antichoque para evitar daños, tecnología RAMP- LOADING y una carcasa antideslizante para fijar el disco en cualquier suficiente. El sistema de análisis y alertas Drive Space Alert monitoriza los sistemas de back-up y la capacidad del disco avisando cuando le queda poca capacidad.
Pensando en el intenso movimiento de los usuarios, los discos cuentan con un sensor antichoque para evitar daños, tecnología RAMP- LOADING y una carcasa antideslizante para fijar el disco en cualquier suficiente. El sistema de análisis y alertas Drive Space Alert monitoriza los sistemas de back-up y la capacidad del disco avisando cuando le queda poca capacidad.
0 comentarios